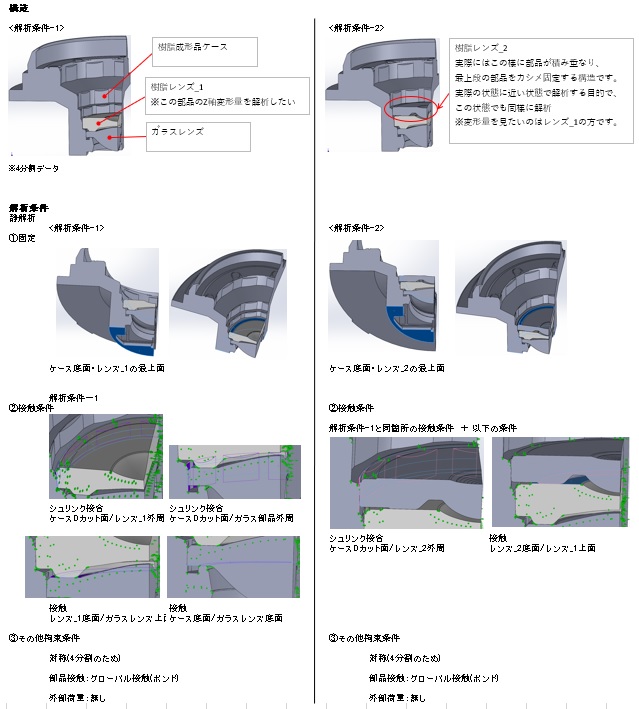
質問: Solidworks simulation 構造解析について
鈴木さん、こんにちは。
シュリンク結合は使ったことがないのでよくわからないのですが、1点気になったのは、
ケース底面と各レンズ最上面の2ヶ所を「固定」しているようですが、これだとその2ヶ所の面は全く変形・移動しないことになるので、特に圧入箇所に近い部分だと何かしら悪さをしそうかな・・・と思いました。
ケースだけ動かなければいいように思いますが2ヶ所必要でしょうか?
なるべく変形には影響無さそうな箇所か、1方向のみ移動制限とフリーボディフォースなどを使って「拘束」の仕方を検討してみてはいかがでしょうか。
違ってたらすいません。
鈴木さん、はじめまして。新谷です。
こちらのQ&Aはあまり見ている人が多くないので、トップメニューの「フォーラムに投稿」にこちらのリンクを貼り付けてもらうと回答が増えると思います。
あと、画像が縮小されすぎて読みづらいので、縮小前の画像を4つぐらいに分割して貼り付けてもらうと見やすくなると思います。
解析は素人なので外しているかもしれませんが、デフォルトのメッシュが荒くて誤差が大きくなっているかもしれません。
メッシュの切り方を変えて試されていますか?
新谷様
アドバイス頂きありがとうございます。トップメニューの方にリンクはりたいと思います。
メッシュについてはなるべく細かい方で解析していましたが、少しサイズを変えて状況が変わるかは
見てみようと思います。
— 鈴木陽介 2494 日前
最初のコメントで、うろ覚えのまま「フリーボディフォース」と書いてしまいましたが、こちらは計算結果のことであって、モデルを安定させる設定の方は「ソフトスプリング」でしたね。(どちらも静解析オプションでの設定)
お詫びして訂正させていただきます。
鈴木さん はじめまして。
フープ応力と変位の問題ですかね。
私も①の固定が「本当にそこなのかなって」気になります。
また、対称は周期対称もしくはローラースライダー、
「グローバルボンド」は捨てて
ケースと各レンズ間は「シュリンク結合」
各レンズ間は「接触」ではないのかなと思います。
摩擦係数が絡むので大変な解析かもしれませんね。
接触問題が増えると計算がとても大変なので
もし自分なら仮想壁を使ってレンズ1単体で解析するかなって思いました。
御社としても設計上の秘密があると思いますので
ダミーデーター等で議論ができればと思います。
— 酒井陽三 2490 日前
辻様 新谷様 酒井様
先日はアドバイスを頂きましてありがとうございます。
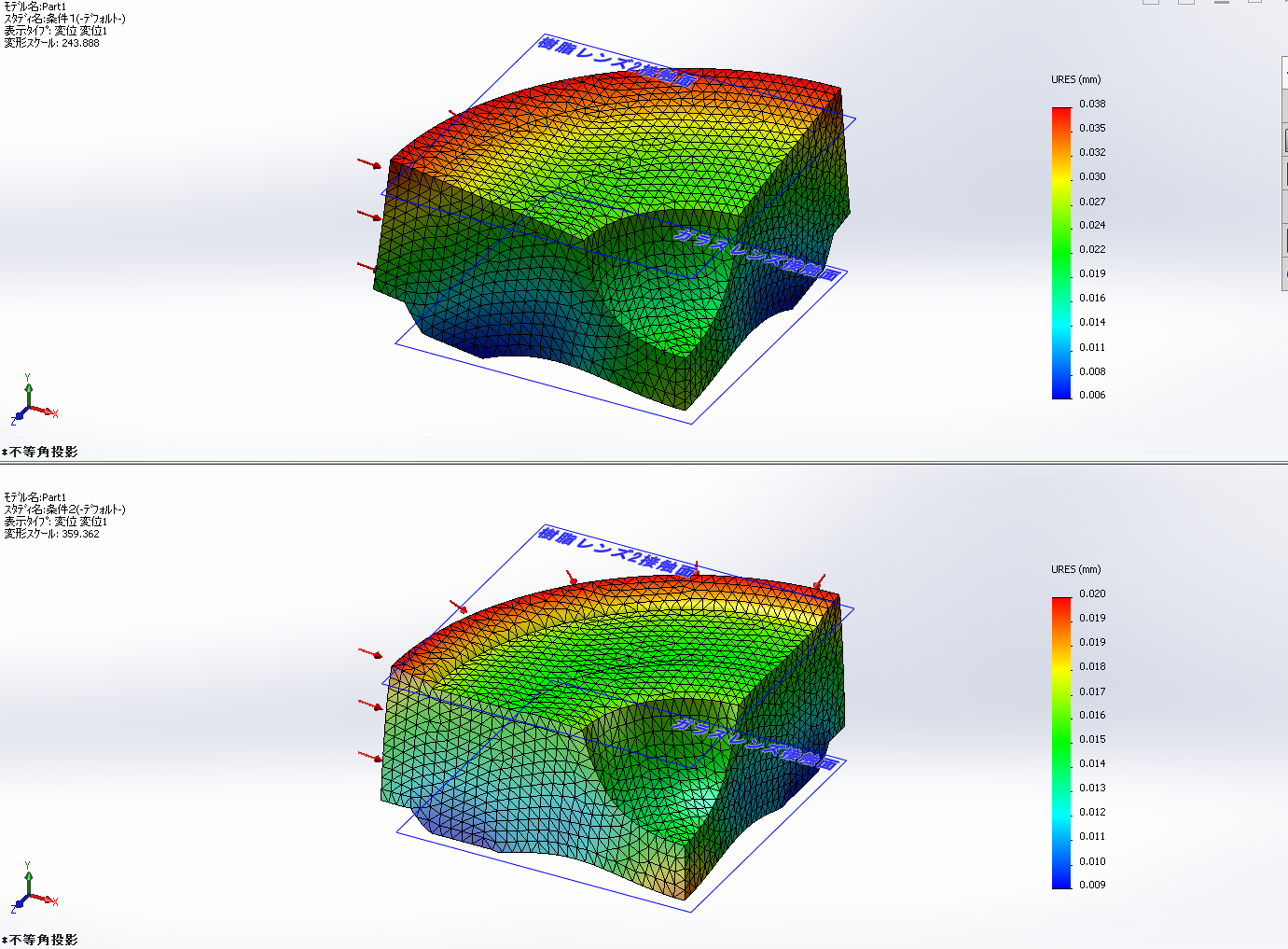
拘束条件について色々と検討し、条件1,2共に実際の変形状態に近い条件を見つける事ができました。
(疑問は残る条件ですが・・・)
下記の様な条件になっています。
グローバルボンド:削除
ケース底面の拘束:参照ジオメトリでZ方向のみ拘束
レンズ上面の拘束:無し
レンズ上面にダミーレンズを追加し、ダミーに外部荷重(圧力)を追加(下記に絵を添付します)
組立の際に、レンズ上面に加圧するのでやってみた条件です。
ただ、実物の形状測定の際は圧力はかかっていないので、本当に正しい条件なのかは少し疑問です。
(レンズの変形は弾性変形です)
他のレンズ変形も解析し、この条件である程度の整合がとれるかを見ていきたいと思います。
また煮詰まった際は、アドバイス頂ければ幸いです。
また、レンズ上面の拘束条件についてやってみた結果を簡単に下記します。
1. ローラースライダー拘束:条件1と2の方向は合う。実物とは逆方向に変形
2. 参照ジオメトリでZ方向拘束:条件1と2の方向は合う。実物とは逆方向に変形
3. 拘束を無くしソフトスプリング:レンズが動いてしまう。
4. 3に加えて慣性力効果適用:レンズが動いてしまう。
5. 4分割→2分割で解析:4分割と結果同じ
6. メッシュサイズ変更(細かい状態→粗くする):数値的に少しバラツキが出る程度で大枠は変わらない。
— 鈴木陽介 2473 日前